Xu hướng phát triển xe tự hành
Công nghệ xe tự lái là một lĩnh vực mới và đang được các doanh nghiệp Việt Nam đón đầu phát triển trên cơ sở của cuộc Cách mạng công nghiệp lần thứ 4. Trong đó FPT, Phenikaa-X và VinFast là 3 doanh nghiệp Việt đặt những nền móng cho xe tự hành ở Việt Nam. Các mẫu xe sở hữu công nghệ thông minh, đáp ứng mục tiêu nâng cao chất lượng sống của người dân trong tương lai đô thị thông minh, thân thiện với môi trường… Lợi ích của xe tự lái là có thể thay thế con người làm chủ vô lăng đến 90%. Khả năng này ngày càng được cải thiện để gia tăng độ an toàn và hạn chế một số rủi ro nhất định.

Hình 1. Công nghệ xe tự lái góp phần cải thiện tình trạng giao thông.
Tới tháng 8/2021, VinFast cũng đã thử nghiệm thành công mẫu xe tự hành cấp độ 4 với hàng loạt trang bị công nghệ có thể di chuyển với tốc độ tối đa 30 km/giờ. VinFast cũng ứng dụng công nghệ tự hành trên các mẫu xe điện thông minh mới vừa ra mắt và xe buýt điện sắp được vận hành thương mại trên đường phố. Trong quá trình xử lý của xe tự hành, ứng dụng kỹ thuật phân đoạn ảnh cung cấp các thông tin về không gian làn đường, phát hiện các đối tượng tham gia giao thông để hỗ trợ cho quá trình tự lái.
Kỹ thuật phân đoạn ảnh
Quá trình xử lý ảnh là nâng cao chất lượng ảnh và xử lý số liệu cung cấp cho các quá trình khác, trong đó có việc ứng dụng thị giác vào điều khiển. Đã có rất nhiều công trình nghiên cứu tại các quốc gia từ năm 1920 về xử lý ảnh, trong đó có kỹ thuật phân đoạn ảnh. Và hiện nay các kỹ thuật xử lý ảnh và phân đoạn ảnh đang được giới khoa học quan tâm đến nhiều hơn, tiến hành xây dựng các phương pháp, thuật toán tối ưu trên từng đối tượng ảnh khác nhau. Các bước cơ bản trong xử lý ảnh có thể được mô tả như ở hình 2.
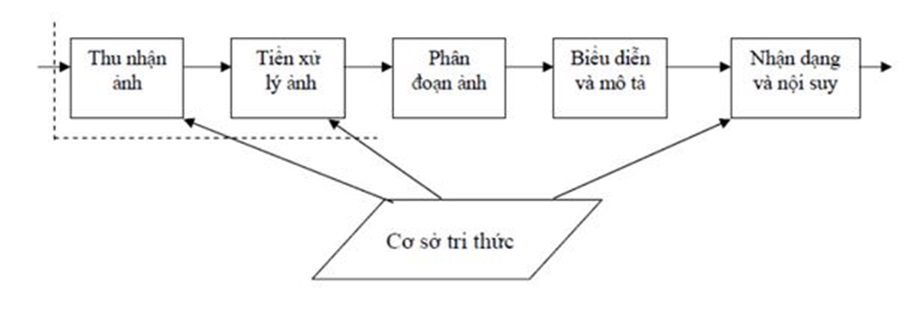
Hình 2. Các bước cơ bản trong xử lý ảnh.
Phân đoạn ảnh giữ một vai trò rất quan trọng trong nhiều ứng dụng như các bài toán nhận dạng hay các bài toán xử lý ảnh. Bài toán nhận dạng ảnh là một bài toán lớn, có rất nhiều ý nghĩa thực tiễn. Có thể thấy rằng, để nhận dạng ảnh trở nên dễ dàng thì ảnh cần phải tách thành các đối tượng riêng biệt, đây cũng là mục đích chính của bài toán phân đoạn ảnh. Nếu phân đoạn ảnh không tốt sẽ dẫn đến sai lầm trong quá trình nhận dạng ảnh, nên phân đoạn ảnh được xem là vấn đề then chốt trong quá trình xử lý ảnh nói chung.
Phân đoạn ảnh nhằm phân tích ảnh thành những thành phần có cùng tính chất dựa theo biên hay các vùng liên thông. Một cách tổng quát, phân đoạn ảnh được định nghĩa như việc chia hình ảnh thành các đối tượng độc lập với nhau dựa trên các đặc tính của ảnh như mức xám hay kết cấu của ảnh (hình 3). Dựa vào đặc tính vật lý của vùng ảnh, có thể có nhiều kỹ thuật phân đoạn ảnh như: phương pháp ngưỡng, tách biên, phương pháp thống kê MLC (Maximum likehood classifier), phương pháp dựa trên mạng nơ-ron, phương pháp dựa trên các thuật toán phân cụm dữ liệu. Thông thường, các kỹ thuật dựa trên phân cụm trả về kết quả là nhiều hơn 2 cụm, trong khi đó các phương pháp dựa trên ngưỡng trả về là 2 cụm. Thuật toán phân cụm là phương pháp phổ biến được sử dụng trong kỹ thuật phân đoạn ảnh.

Hình 3. Kỹ thuật phát hiện và phân đoạn ảnh theo đối tượng.
Phân cụm là kỹ thuật rất quan trọng trong khai phá dữ liệu, nó thuộc lớp các phương pháp học không giám sát trong học máy (Machine learning). Có rất nhiều định nghĩa khác nhau về kỹ thuật này, nhưng về bản chất có thể hiểu phân cụm là các quy trình tìm cách nhóm các đối tượng đã cho vào các cụm (clusters), sao cho các đối tượng trong cùng một cụm là tương tự nhau. Thuật toán phân cụm K-means được giới thiệu năm 1957 bởi Lloyd K-means và là phương pháp phổ biến nhất cho việc phân cụm.
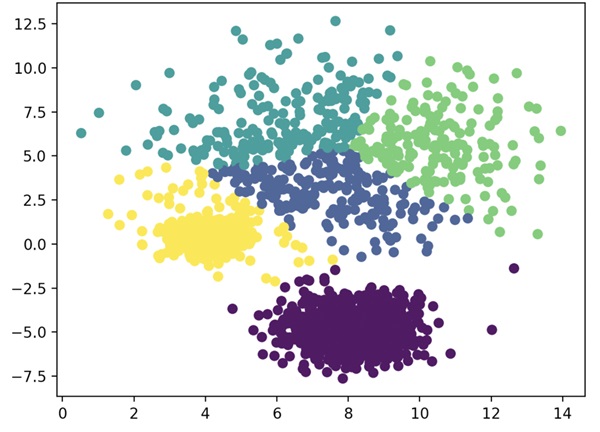
Hình 4. Kết quả phân cụm dữ liệu theo K-means với 5 cụm.
Tư tưởng chính của thuật toán K-Means là tìm cách phân nhóm các đối tượng đã cho vào k cụm (k là số các cụm được xác đinh trước, k nguyên dương) sao cho tổng bình phương khoảng cách giữa các đối tượng đến tâm nhóm (centroid) là nhỏ nhất. Về cơ bản, thuật toán phân cụm K-means sử dụng phương pháp tạo và cập nhật trung tâm để phân nhóm các điểm dữ liệu cho trước vào các nhóm khác nhau.
Đầu tiên chúng sẽ tạo ra các điểm trung tâm ngẫu nhiên. Tiếp đó là gán mỗi điểm trong tập dữ liệu vào trung tâm gần nó nhất. Sau đó chúng sẽ cập nhật lại trung tâm và tiếp tục lặp lại các bước đã kể trên. Điều kiện dừng của thuật toán: khi các trung tâm không thay đổi trong 2 vòng lặp kế tiếp nhau. Tuy nhiên, việc đạt được một kết quả hoàn hảo là rất khó và tốn thời gian, vậy nên thường người ta sẽ cho dừng thuật toán khi đạt được một kết quả gần đúng và chấp nhận được.
Ứng dụng phân đoạn ảnh đối với xe tự hành
Ô tô tự lái, còn được gọi là xe tự hành, kết hợp tính năng tự động hóa phương tiện, có khả năng cảm nhận môi trường của nó và di chuyển an toàn mà không cần hoặc không có sự tham gia của con người. Xe tự hành đóng vai trò quan trọng trong việc giảm thiểu áp lực và sự phân tâm cho người điều khiển nhằm đảm bảo an toàn, đáng tin cậy và mang lại lợi ích vượt trội cho các tiêu chuẩn sống của đô thị.
Trong quá trình vận hành xe tự hành, phân đoạn ảnh cung cấp các thông tin về không gian ở trên đường, phát hiện các đối tượng và các biển báo giao thông, xác định làn đường, các xe ô tô, người đi bộ… để hỗ trợ cho ô tô tự lái.
Qua thực nghiệm cho thấy rằng kết quả của việc phân đoạn tốt và ổn định phụ thuộc rất nhiều vào tham số là số k tâm cụm được khởi tạo. Trong trường hợp k tâm cụm khởi tạo này có độ lệch thực tế lớn thì kết quả của việc phân cụm là thấp. Để khắc phục điểm yếu này, ta có thể thực hiện giải pháp tính toán trước khi thực hiện phân cụm bằng cách gộp nhóm các điểm ảnh có cùng màu sắc và sắp xếp chọn ra k nhóm màu có số lượng điểm ảnh nhỏ nhất và khởi tạo k tâm cụm là một trong các điểm ảnh của k nhóm này. Nhược điểm của phương pháp này là đối với ảnh đầu vào có kích thước lớn và khoảng các giá trị màu sắc rộng thì phải chịu khá nhiều chi phí tính toán, sắp xếp để tính được k nhóm màu có số lượng điểm ảnh lớn nhất. Tuy nhiên, kết quả phân cụm của phương pháp đảm bảo tốt hơn việc khởi tạo ngẫu nhiên.
TÀI LIỆU THAM KHẢO
1. R. Siddheswar, R.H. Turi (1999), Determination of number of clusters in k-means clustering and application in colour image segmentation, Proceedings of the 4th international conference on advances in pattern recognition and digital techniques.
2. K. Arai, A.R. Barakbah (2007), Heirarchical K-means: An algorithm for Centroid initialization for K-means, Saga University.
3. S.K. Pal, et al. (1993), "A review on image segmentation techniques", Pattern recognition, 26(9), pp.1277-1294.
4. J. Arunpriyan, et al. (2019), Real-time speed bump detection using image segmentation for autonomous vehicles, International Conference on Intelligent Computing, Information and Control Systems. Springer, Cham.
5. https://ictvietnam.vn/nganh-cong-nghe-xe-tu-lai-tai-viet-nam-don-dau-xu-the-20211210160327288.htm.