Giới thiệu
Các hệ thống giao thông thông minh (ITS) ra đời nhằm giải quyết các vấn đề như khí thải carbon, ùn tắc, tai nạn giao thông đã và đang tồn tại trong giao thông tại nhiều quốc gia trên thế giới. Theo Nghị viện châu Âu [1], ITS là các hệ thống tích hợp viễn thông, điện tử và công nghệ thông tin với kỹ thuật giao thông vận tải để lập kế hoạch, thiết kế, vận hành, bảo trì và quản lý hệ thống giao thông. Theo đó, hệ thống có thể cung cấp cho người dùng thông tin về thời gian di chuyển cũng như lộ trình tối ưu cho một điểm đến chọn trước. Mặt khác, hệ thống cần phải thích ứng và phản ứng linh hoạt với những thay đổi liên tục của tình trạng giao thông như trong các thành phố lớn.
Để có được sự phản ứng đó, hệ thống cần đưa ra những dự đoán về lưu lượng giao thông tại những thời điểm trong tương lai căn cứ vào những dữ liệu thu thập được về lưu lượng giao thông, tốc độ tại những điểm trong thành phố thông qua các camera và cảm biến. Ngoài ra, những dữ liệu về lưu lượng giao thông được ghi nhận trước đó, những sự cố giao thông, hoặc thông tin về thời tiết cũng có thể là những chỉ số đáng tin cậy giúp cho việc dự đoán lưu lượng giao thông được chính xác [2].
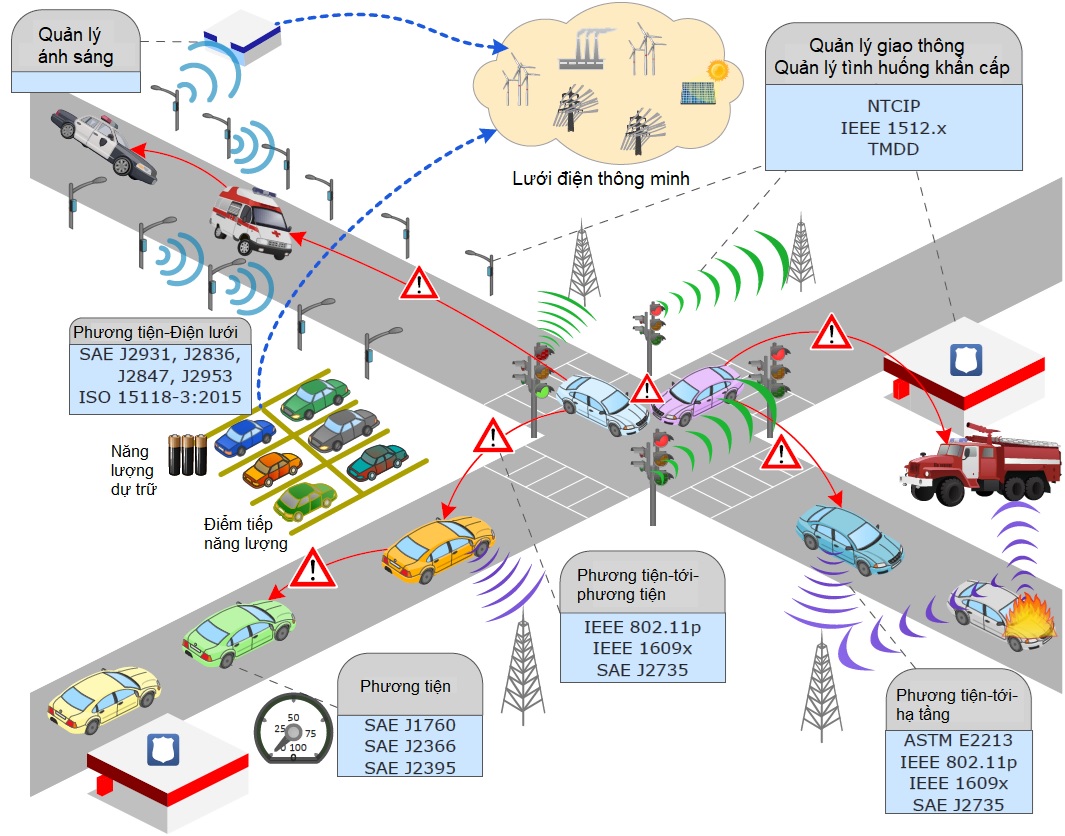
Hình 1. Các thành phần của hệ thống giao thông thông minh [3].
Ứng dụng ML dự đoán lưu lượng giao thông
Có 2 yếu tố cần quan tâm là thời gian (temporal) và không gian (spatial). Câu hỏi đặt ra là có hoặc không xem xét đến các yếu tố về không gian giữa các chuỗi thời gian (time series) lưu lượng giao thông [4]. Hình 2 mô tả một mô hình học máy sử dụng các dữ liệu giao thông theo thời gian thực kết hợp với dữ liệu giao thông được ghi nhận trước đó [5].
Các mô hình dự đoán lưu lượng giao thông không sử dụng yếu tố không gian
Thông thường, dự đoán lưu lượng giao thông được mô hình dưới dạng bài toán hồi quy của chuỗi thời gian. Các kỹ thuật cơ bản như tính trung bình (historial average) đã được sử dụng để dự đoán. Theo đó, mô hình này sử dụng giá trị trung bình (có trọng số) của một mốc thời gian trước đó để dự đoán cho thời điểm trong tương lai. Mô hình trung bình động (moving average) cũng sử dụng ý tưởng tương tự để dự đoán. Mô hình dự đoán chuỗi thời gian nổi tiếng ARIMA (auto-regressive integrated moving average) cũng được sử dụng thành công để dự đoán lưu lượng giao thông [4]. Cùng với sự phát triển của ML, các kỹ thuật ML đã được sử dụng để dự đoán, như K-láng giềng gần nhất (KNN), mô hình Markov ẩn (Hidden Markov Model - HMM), véc-tơ hỗ trợ hồi quy (Support Vector Regression - SVR). Tuy nhiên, những mô hình này thông thường phải dựa trên giả thuyết là địa điểm dự đoán cố định, điều này thường không phù hợp với dữ liệu giao thông trên thực tế. Hơn nữa, các mô hình mạng nơ-ron đã được ứng dụng để mô hình hoá các phụ thuộc thời gian không tuyến tính nhằm dự báo lưu lượng giao thông. Chẳng hạn, mạng nơ-ron niềm tin sâu (deep belief network) đã được sử dụng để mô hình hoá các chuỗi thời gian lưu lượng giao thông [4]. Mạng nơ-ron hồi quy (Recurrent Neural Network - RNN) hoặc một phiên bản đặc biệt của nó là mạng nơ-ron bộ nhớ ngắn dài hạn (Long Short-Term Memorry - LSTM) cũng được nhiều tác giả sử dụng để dự đoán lưu lượng giao thông [6]. Nhược điểm của các phương pháp này là mô hình các chuỗi thời gian tách biệt và không xử lý được mối quan hệ về không gian giữa chúng.
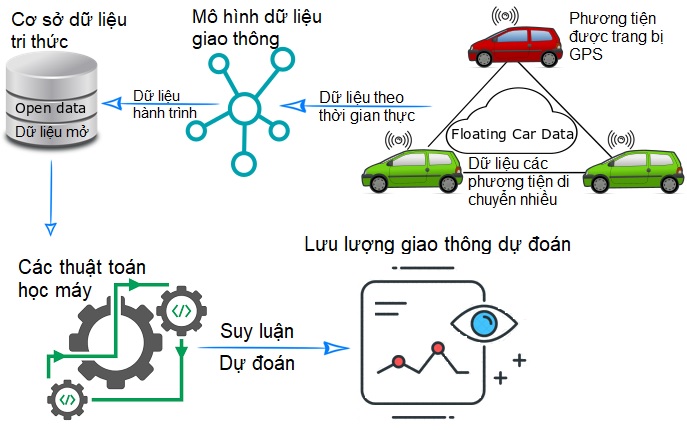
Hình 2. Một mô hình dự đoán lưu lượng giao thông sử dụng ML [5].
Các mô hình dự đoán lưu lượng giao thông có sử dụng yếu tố không gian
Theo cảm nhận trực quan, mật độ giao thông tại các điểm quan sát có xu hướng liên quan với nhau khi người tham gia giao thông di chuyển trên con đường giữa các điểm quan sát. Hình 3 mô tả mật độ giao thông tại các điểm quan sát (được đánh số từ 1-63) [7]. Để ghi nhận và xử lý được các ràng buộc về không gian, các nhà nghiên cứu đã mở rộng các phương pháp hiện có để xử lý các chuỗi thời gian đa biến. Cụ thể, các mô hình véc-tơ tự động hồi quy (Vector Auto-regressive), véc-tơ ARIMA, ARIMA không - thời gian (Spatiotemporal ARIMA), mô hình Markov ẩn không - thời gian (Spatiotemporal HMM). Mối quan hệ giữa các chuỗi thời gian được mô hình trong các không gian ẩn (latent space), các mô hình sẽ học những mối liên hệ không - thời gian đó và dự đoán trên các chuỗi thời gian đa biến.
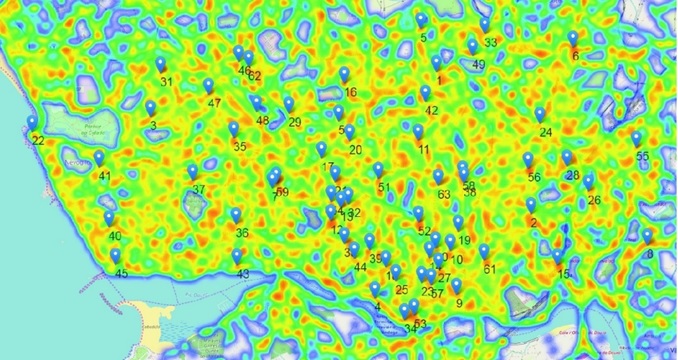
Hình 3. Mật độ giao thông tại các điểm quan sát (màu đậm thể hiện mật độ giao thông cao) [7].
Các mô hình học sâu (deep learning) được áp dụng trong thời gian gần đây đem lại hiệu quả cao để dự đoán lưu lượng giao thông. Thông tin từ hàng láng giềng (điểm quan sát) gần nhất được lựa chọn dựa trên sự phụ thuộc về mặt không gian giữa các chuỗi thời gian tương ứng [7]. Từ đó, các chuỗi thời gian đa biến được xây dựng và đưa vào một mô hình mạng nơ-ron LSTM để dự đoán. Mạng lưới giao thông được mô hình dưới dạng ảnh và mạng nơ-ron tích chập (Convolutional Neural Networks - CNN) được sử dụng để ghi nhận những ràng buộc về mặt không gian của các chuỗi thời gian [8]. Các nhà nghiên cứu khác lại mô hình hoá mạng lưới giao thông thành các đồ thị có trọng số và sử dụng mạng nơ-ron hồi quy tích chập khuếch tán (diffusion convolutional recurrent neural network - DCRNN) nhằm nắm bắt một cách có hệ thống sự phụ thuộc tôpô giữa các chuỗi thời gian bằng cách sử dụng tích chập khuếch tán [9].
Một số vấn đề cần quan tâm
Việc ứng dụng các mô hình ML nhằm dự đoán lưu lượng giao thông đã đem lại nhiều kết quả khả quan, hứa hẹn cho sự ra đời và phát triển của các hệ thống giao thông thông minh mới ở các nước đang phát triển như Việt Nam. Tuy nhiên, có một số vấn đề dưới đây cần tiếp tục được nghiên cứu:
Dữ liệu giao thông
Dữ liệu là thành phần cực kỳ quan trọng cho các mô hình ML, đặc biệt là các mô hình dựa trên dữ liệu (data-driven). Do đó, việc thu thập dữ liệu giao thông là yêu cầu trước hết cho việc xây dựng các mô hình dự báo.
Dự đoán với các tình huống cực đoan
Trong tình trạng giao thông bình thường, việc dự đoán lưu lượng giao thông là khá dễ dàng. Yêu cầu đối với các mô hình dự đoán là cần xử lý được với các tình huống tiêu cực, như giờ cao điểm hoặc có tai nạn giao thông.
Tích hợp dự đoán lưu lượng giao thông với các ứng dụng khác
Hiện tại, việc dự đoán lưu lượng giao thông và các ứng dụng được thực thi riêng rẽ. Chẳng hạn, việc tính toán thời gian di chuyển (travel time estimation - ETA) cần được kết hợp hoặc sử dụng kết quả của mô hình dự đoán lưu lượng để có thể ước tính thời gian di chuyển chính xác hơn.
Dự đoán lưu lượng giao thông trong thời gian dài
Hiện nay, các mô hình dự đoán lưu lượng giao thông hầu hết đang dự đoán lưu lượng giao thông cho tương lai gần (theo giờ). Tuy nhiên, trên thực tế, tình trạng giao thông hiện tại có thể có mối liên hệ chặt chẽ với những tình trạng giao thông trước đó nhiều ngày, tuần, tháng. Do đó, các mô hình dự đoán, đặc biệt là các mô hình học sâu như RNN hoặc CNN cần xử lý được những ràng buộc thời gian không tuyến tính trong thời gian dài của các chuỗi thời gian.
Các mô hình dự đoán có thể giải thích (interpretable)
Trên thực tế, các mô hình dự đoán với độ chính xác cao (chẳng hạn các mô hình học sâu), thường là các mô hình khó có thể giải thích do tính phức tạp của mô hình. Do đó, sẽ là lý tưởng nếu các mô hình có thể lý giải được kết quả dự đoán hoặc chỉ ra được các yếu tố không gian, thời gian nào cái mà ảnh hưởng đến kết quả dự đoán. Điều này sẽ đặc biệt có ý nghĩa với những người ra quyết định, các nhà hoạch định chính sách hoặc đơn giản là trợ giúp cho các ứng dụng khác, chẳng hạn ước tính thời gian di chuyển.
Đánh giá độ chính xác của mô hình dự đoán
Thông thường, các mô hình được đánh giá dựa trên giá trị của chuỗi thời gian kết quả và được báo cáo thông qua các độ đo thống kê như sai số tuyệt đối trung bình (Mean Absolute Error - MAE), sai số bình phương trung bình (Mean Squared Error - MSE và Root Mean Squared Error - RMSE), sai số tuyệt đối phần trăm trung bình (Mean Absolute Percentage Error - MAPE hoặc Symmetric Mean Absolute Percentage Error - SMAPE). Các kết quả tổng hợp thường xem xét tất cả các điểm quan sát (các cảm biến) với độ quan trọng như nhau. Tuy nhiên, trên thực tế, các cảm biến đặt tại các nút giao thông với diện tích lớn và mật độ giao thông cao tại các giờ cao điểm có thể đóng vai trò quan trọng hơn. Điều đó đòi hỏi cần có một độ đo có xem xét đến cả không gian và thời gian.
TÀI LIỆU THAM KHẢO
[1] https://eur-lex.europa.eu/eli/dir/2010/40/oj.
[2] L. Aronsson, A. Bengtsson (2019), Machine learning applied to traffic forecasting, Chalmers University of Technology.
[3] Y. Yılmaz, et al. (2016), A preliminary work on predicting travel times and optimal routes using Istanbul’s real traffic data, Proceedings of the 9th transist transport congress and exhibition.
[4] Y. Li, C. Shahabi (2018), “A brief overview of machine learning methods for short-term traffic forecasting and future directions”, Sigspatial Special, 10(1), pp.3-9.
[5] M. Mzibri, A. Maach, A. Elhadri (2019, March), “A novel traffic prediction system based on floating car data and machine learning”, Proceedings of the 2nd International Conference on Networking, Information Systems & Security, pp.1-6.
[6] X. Ma, et al. (2015), “Long short-term memory neural network for traffic speed prediction using remote microwave sensor data”, Transportation Research Part C: Emerging Technologies, 54, pp.187-197.
[7] L.Q. Tai, W. Nejdl, M. Spiliopoulou, E. Ntoutsi (2019), “A neighborhood-augmented LSTM model for taxi-passenger demand prediction”, International Workshop on Multiple-Aspect Analysis of Semantic Trajectories, pp.100-116.
[8] X. Ma, et al. (2017), “Learning traffic as images: a deep convolutional neural network for large-scale transportation network speed prediction”, Sensors, 17(4), pp.818.
[9] Y. Li, R. Yu, C. Shahabi, Y. Liu (2018), “Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting”, International Conference on Learning Representations, pp.1-10, DOI:10.48550/arXiv.1707.01926.