Mở đầu
Trong những năm gần đây, công nghệ xe tự lái đã thu hút sự quan tâm đặc biệt từ các nhà nghiên cứu, các công ty công nghệ và cả người dân. Đây không phải là một lĩnh vực mới, mà ngay từ những năm 1920, ý tưởng về một phương tiện có hệ điều hành riêng và có thể tự hành đã xuất hiện. Nhưng phải đến năm 1980, khi Mercedes-Benz và Đại học Munich công bố hình thức xe tự lái đầu tiên, hướng đi này mới được thế giới chú ý đến và phát triển bùng nổ. Với khả năng giảm thiểu tai nạn giao thông, tối ưu hóa luồng giao thông và thay đổi căn bản ngành công nghiệp ô tô và vận tải, xe tự lái đang dần thay đổi tương lai của chúng ta theo cách chưa từng có.
Không chỉ vậy, việc đưa nhiều công nghệ tiên tiến như trí tuệ nhân tạo (AI), cảm biến, học máy (machine learning), hệ thống định vị, công nghệ điều hướng… vào sản xuất và vận hành đã khắc phục các nhược điểm cố hữu của hình thức xe này. Những công nghệ này cho phép xe tự nhận diện môi trường xung quanh, từ đó đưa ra quyết định lái xe và tự động hóa quá trình di chuyển mà không cần sự can thiệp của con người. Bài viết tóm tắt một số tiến bộ trong việc thiết kế, sản xuất và lập trình cho xe tự lái trong thời gian gần đây, bao gồm cả những bước phát triển về phần cứng lẫn phần mềm của xe.
Công nghệ cảm biến cho xe tự lái
Cảm biến là thiết bị cho phép ghi lại và chuyển đổi các thông tin về môi trường thành dạng dữ liệu mà máy tính có thể hiểu được. Dựa trên lĩnh vực hoạt động, có hai dạng cảm biến: cảm biến bên trong ghi lại trạng thái hoạt động của hệ thống, thiết bị; cảm biến bên ngoài ghi lại thông tin từ môi trường bên ngoài hệ thống, ví dụ như khoảng cách, cường độ ánh sáng, nhiệt độ, vị trí…
Cảm biến bên ngoài
Hiện nay, có 3 công nghệ cảm biến môi trường bên ngoài có thể áp dụng trên xe tự lái, đó là camera, radar và lidar. Các cảm biến radar phát hiện vật thể ở tầm ngắn đến trung bình (50-100 m), một số loại mở rộng phạm vi hoạt động đến 150 m. Radar thường kết hợp với hệ thống ADAS (Advanced Driver-Assistance Systems) để kiểm soát hành trình và phát hiện va chạm. Cũng nằm trong vùng hoạt động dưới 250 m, camera là loại cảm biến có phạm vi hoạt động rộng thứ hai. Khác với radar, camera hoạt động theo nguyên lý cảm biến ánh sáng thụ động để tạo ra hình ảnh kỹ thuật số (hiển thị cả màu sắc và kết cấu), phát hiện cả vật cản tĩnh và động, nhờ vậy nó cũng đồng thời cho phép nhận diện biển báo đường bộ, đèn giao thông và vạch kẻ đường. Tuy nhiên, hiệu suất của camera bị ảnh hưởng bởi điều kiện môi trường. Nếu Radar và Camera là hệ thống cảm biến với tầm hoạt động gần và trung, thì lidar là hệ thống cảm biến phát hiện và đo khoảng cách tới vật thể bằng ánh sáng và có tầm hoạt động lên đến 250 m. Lidar dựa vào thời gian và cường độ phản xạ của các xung ánh sáng hồng ngoại hoặc laser để tạo thành dữ liệu dưới dạng đám mây điểm, từ đó ước tính hình dạng và khoảng cách tới vật cản.
Về vị trí lắp đặt, Radar tầm ngắn thường được gắn ở hai bên xe để phát hiện vật cản ở góc khuất, và gắn ở trước và sau xe để phát hiện chướng ngại vật. Camera thường được lắp ở phía trước và sau xe để nhận diện vật cản khi xe tiến hoặc lùi. Lidar với phạm vi hoạt động xa thường được lắp đặt ở phía đầu xe để phát hiện sớm các vật cản từ xa hoặc khi xe di chuyển với tốc độ cao (hình 1).
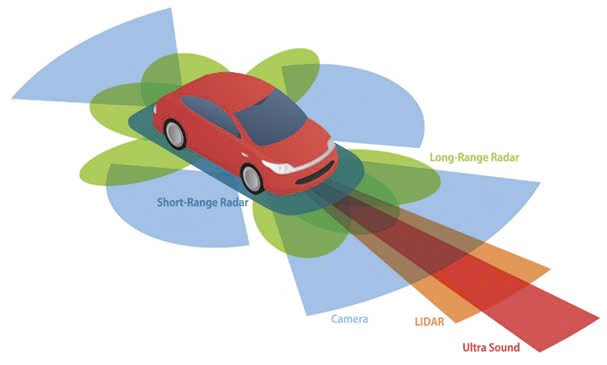
Hình 1. Vị trí của các loại cảm biến trên xe tự lái.
Cảm biến bên trong
Khác với các hệ cảm biến bên ngoài, các cảm biến bên trong lại chú trọng đến các thông tin về bản thân chiếc xe, như vị trí, tốc độ di chuyển… Hiện nay, 3 loại cảm biến mới được cập nhật và đã xuất hiện trong một số dòng xe điện là hệ thống định vị vô tuyến (Global Positioning System - GPS), Bộ đo lường quán tính (Inertial Measurement Unit - IMU), và Bộ mã hóa quay (Encoders). GPS là hệ thống định vị vô tuyến dựa trên thông tin vị trí địa lý và thời gian do vệ tinh cung cấp. Căn cứ từ tín hiệu từ ít nhất 4 vệ tinh GPS, xe tự lái có thể tính toán được vị trí của mình dựa trên phương pháp “tam vị trí”. Sai số vị trí của các thiết bị GPS gắn trên xe tự hành dao động 1-3 m. Tuy nhiên, thiết bị thu GPS đòi hỏi phải có đường ngắm trực tiếp với vệ tinh và không được có các vật cản như nhà cao tầng, cây cối, đất đá… Đối với bộ IMU, đây là một cảm biến xác định lực, tốc độ góc, từ trường của vật thể. Mỗi thiết bị IMU thường gồm các bộ đo gia tốc, con quay hồi chuyển và từ kế. Trên xe tự lái, IMU có tác dụng điều khiển và dẫn đường. Tuy nhiên, thiết bị này không thể cung cấp thông tin về vị trí thực tế của phương tiện, mà nó cần được hỗ trợ bởi các nguồn khác, ví dụ như dữ liệu từ GPS. Loại cảm biến bên trong thứ ba là bộ mã hóa quay, đây là thiết bị chuyển đổi dữ liệu vị trí tuyến tính hoặc góc của trục thành tín hiệu mà máy tính có thể hiểu được. Trên xe tự lái, bộ mã hóa quay được đưa vào để tính toán quãng đường di chuyển của xe cũng như xác định vị trí tương đối của xe.
Cảm biến kết hợp
Hiện đang có nhiều loại cảm biến có thể tích hợp trên xe tự lái và chúng đóng vai trò cung cấp các thông tin thiết yếu trong quá trình vận hành và điều khiển xe. Tuy nhiên, với nhiều loại cảm biến như vậy, đồng nghĩa với việc hệ thống máy tính phải đọc cùng lúc rất nhiều dòng thông tin phức tạp. Chính vì vậy, hiện nay, một hướng phát triển cảm biến mới được ra đời, đó là cảm biến kết hợp, nhằm hợp nhất các dữ liệu, từ đó tăng nhận thức của xe và tạo thành một hệ thống đáng tin cậy hơn. Một dạng kết hợp thường thấy là Vision - lidar/radar. Hệ thống này là cho phép kết hợp các thông tin từ cảm biến camera và cảm biến Lidar hoặc Radar để tạo thành một đám mây điểm 3D, từ đó cho phép định vị, phát hiện nhiều đối tượng đồng thời và mô hình hóa môi trường xung quanh xe. Ngoài việc kết hợp các cảm biến môi trường bên ngoài với nhau, một hướng đi khác là tích hợp các cảm biến bên trong nhằm xác định được vị trí chính xác của phương tiện. Hệ cảm biến GPS-IMU ra đời dựa trên các mô hình dự đoán và các ràng buộc lưới chiếm dụng, từ đó loại bỏ các giá trị ngoại lai và phát triển mô hình dự đoán có độ chính xác cao hơn, tăng hiệu quả điều hướng xe. Một sự kết hợp khác được đề xuất là RSSI-IMU. Đây là sự kết hợp giữa hệ thống chỉ báo cường độ tín hiệu đã nhận và IMU nhằm nâng cao hiệu suất tính toán của máy tính, loại bỏ các sai số về vận tốc có thể xuất hiện.
Trí tuệ nhân tạo, học máy và học sâu
Ngoài những đột phá về công nghệ cảm biến và cảm biến kết hợp, sự ra đời của AI, học sâu (Deep learning) và học máy (Machine learning) cũng đem đến những bước phát triển mới cho ngành sản xuất xe tự lái.
AI đóng vai trò quan trọng trong việc phát triển các hệ thống nhận diện và xử lý hình ảnh cho xe tự lái. Các hệ thống này sử dụng các thuật toán AI để phân tích và nhận diện môi trường xung quanh xe, bao gồm các vật thể, người đi bộ và biển báo giao thông. Nhờ đó, xe có thể đưa ra những quyết định lái xe an toàn và hiệu quả. Hệ thống AI còn giúp tối ưu hóa hiệu suất và tiết kiệm năng lượng cho xe bằng cách quản lý động cơ và hệ thống pin một cách thông minh. Ngoài ra, các thuật toán học máy được sử dụng để phân tích dữ liệu lái xe từ các cảm biến và camera, học hỏi từ các tình huống lái xe khác nhau. Điều này giúp hệ thống lái tự động của xe có thể dự đoán và xử lý các tình huống phức tạp trên đường. Hơn nữa, học máy còn được áp dụng trong việc tối ưu hóa thiết kế của xe tự lái nhằm cải thiện hiệu suất và an toàn. Các thuật toán học máy có thể tìm ra những thiết kế tối ưu nhất thông qua việc phân tích và kiểm tra nhiều biến thể khác nhau của mẫu thiết kế.
Học sâu, đặc biệt là mạng neural, đóng vai trò quan trọng trong hệ thống xe tự lái. Mạng neural là một loại mô hình học máy được thiết kế để mô phỏng cách hoạt động của bộ não con người. Với khả năng phân tích và xử lý dữ liệu lớn, mạng neural có thể học hỏi từ các dữ liệu lái xe và dự đoán hành vi của các đối tượng xung quanh xe, như phương tiện khác và người đi bộ. Điều này giúp xe tự lái có thể đưa ra những quyết định nhanh chóng và chính xác trong các tình huống giao thông phức tạp.
Giao tiếp giữa xe và môi trường xung quanh (V2X)
Với sự phát triển nhanh chóng của công nghệ, V2X (Vehicle-to-Everything) đã trở thành một yếu tố quan trọng trong ngành công nghiệp xe tự lái. V2X bao gồm việc giao tiếp giữa xe và mọi thứ xung quanh, bao gồm xe khác (V2V), cơ sở hạ tầng (V2I), người đi bộ (V2P) và mạng lưới (V2N). Giao tiếp V2V cho phép các xe tự lái trao đổi thông tin với nhau, giúp cải thiện an toàn và hiệu suất giao thông. Các xe có thể chia sẻ thông tin về tốc độ, vị trí, hướng đi và các sự cố giao thông, từ đó giúp đưa ra những quyết định lái xe chính xác và kịp thời. Điều này giúp giảm thiểu nguy cơ va chạm và tối ưu hóa lưu lượng giao thông, đặc biệt là trong các tình huống giao thông phức tạp.
Giao tiếp V2I cho phép xe tự lái tương tác với các cơ sở hạ tầng giao thông như đèn tín hiệu, biển báo và các trạm thu phí. Điều này giúp xe tự lái có thể nhận biết và phản ứng kịp thời với các điều kiện giao thông thực tế. Ví dụ, khi tiếp cận ngã tư, xe có thể nhận thông tin về trạng thái đèn tín hiệu và điều chỉnh tốc độ một cách hợp lý, giúp giảm thiểu tình trạng ùn tắc giao thông.
Giao tiếp V2P cho phép xe tự lái phát hiện và tương tác với người đi bộ, giúp tăng cường an toàn cho cả người lái và người đi đường. Hệ thống V2P sử dụng các cảm biến và thiết bị liên lạc để nhận biết sự hiện diện và hướng di chuyển của người đi bộ, từ đó đưa ra những quyết định lái xe an toàn. Điều này đặc biệt quan trọng trong môi trường đô thị, nơi có nhiều người đi bộ và các tình huống giao thông phức tạp.
Giao tiếp V2N cho phép xe tự lái kết nối với mạng lưới thông tin, bao gồm các dịch vụ đám mây và hệ thống quản lý giao thông. Điều này giúp xe có thể nhận thông tin cập nhật về điều kiện giao thông, thời tiết và các sự cố giao thông. Hệ thống V2N còn cho phép xe tự lái tương tác với các dịch vụ đám mây để xử lý và lưu trữ dữ liệu, giúp cải thiện hiệu suất và an toàn giao thông.
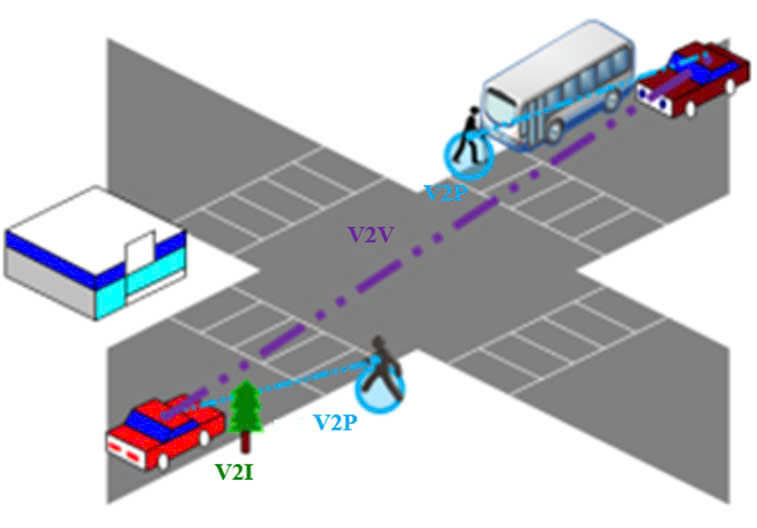
Hình 2. Mô hình giao tiếp giữa xe và môi trường xung quanh.
Những thách thức và rào cản
Mặc dù lĩnh vực xe tự lái đang có những bước phát triển mạnh mẽ trong thời gian gần đây, nhưng nó cũng đang gặp phải nhiều thách thức và rào cản. Một trong những thách thức chính là vấn đề về công nghệ và kỹ thuật. Việc đảm bảo các hệ thống cảm biến như camera, radar và lidar hoạt động chính xác và ổn định trong mọi điều kiện thời tiết và môi trường là một nhiệm vụ không hề dễ dàng. Những hệ thống này cần phải có khả năng nhận diện và phản ứng nhanh chóng với các tình huống giao thông phức tạp.
Thêm vào đó, AI, học máy và học sâu là những công nghệ cốt lõi của xe tự lái, nhưng việc phát triển và tối ưu hóa các thuật toán này đòi hỏi sự đầu tư lớn về thời gian, nguồn lực và dữ liệu. Các thuật toán cần phải học hỏi từ hàng triệu giờ lái xe thực tế để đảm bảo độ an toàn và hiệu quả.
Bên cạnh đó, vấn đề về an ninh mạng cũng là một rào cản lớn. Xe tự lái phải đối mặt với nguy cơ bị tấn công bởi tin tặc, gây nguy hiểm cho hành khách và người tham gia giao thông khác. Việc bảo vệ hệ thống khỏi các cuộc tấn công mạng đòi hỏi phải có các biện pháp bảo mật mạnh mẽ và liên tục được cải tiến.
Ngoài ra, vấn đề pháp lý và quy định cũng đặt ra nhiều thách thức. Hiện tại, nhiều quốc gia vẫn chưa có các quy định cụ thể và đồng bộ về việc sử dụng xe tự lái. Các quy định này cần phải được xây dựng và ban hành để đảm bảo an toàn cho người dân và hỗ trợ sự phát triển của công nghệ.
Thay lời kết
Những tiến bộ gần đây trong công nghệ cảm biến, AI, học sâu, học máy và giao tiếp V2X đã mang lại nhiều bước phát triển vượt bậc cho ngành sản xuất xe tự lái. Các công nghệ này giúp xe tự lái có khả năng nhận diện môi trường, đưa ra quyết định lái xe an toàn và hiệu quả, đồng thời tối ưu hóa hiệu suất và tiết kiệm năng lượng. Đặc biệt, V2X mở ra khả năng giao tiếp giữa xe với cơ sở hạ tầng giao thông và các phương tiện khác, tạo nên một hệ thống giao thông thông minh và an toàn hơn. Tuy nhiên, sự phát triển của xe tự lái không phải không gặp những thách thức. Các vấn đề về công nghệ và kỹ thuật như độ chính xác của các hệ thống cảm biến, tối ưu hóa thuật toán AI, học sâu, học máy và bảo mật an ninh mạng vẫn là những rào cản cần phải vượt qua. Bên cạnh đó, các vấn đề pháp lý, quy định và đạo đức cũng đặt ra nhiều câu hỏi cần được giải quyết để đảm bảo sự an toàn và hiệu quả của xe tự lái. Trong tương lai, với sự cải tiến không ngừng của công nghệ và sự hợp tác chặt chẽ giữa các bên liên quan, chúng ta có thể kỳ vọng xe tự lái sẽ trở thành một phần không thể thiếu của hệ thống giao thông hiện đại, mang lại nhiều lợi ích cho xã hội và người sử dụng.