Mở đầu
Hiện nay, ở Việt Nam có nhiều nhà máy đã và đang trong quá trình hiện đại hóa để nâng cao năng suất lao động cũng như năng lực sản xuất nhằm từng bước tiếp cận cuộc Cách mạng công nghiệp 4.0. Việc trang bị các hệ thống AGV thay thế cho con người đang ngày càng trở nên cần thiết và phổ biến. Có nhiều hãng sản xuất xe AGV khác nhau, nhưng điểm khác biệt lớn nhất là công nghệ dẫn đường.
Được sự tài trợ của TP Hà Nội thông qua Chương trình KH&CN cấp thành phố: Điện - Điện tử - Tự động hóa (01C-02), giai đoạn 2020-2022, nhóm nghiên cứu thuộc Viện Tự động hóa Kỹ thuật quân sự đã nghiên cứu, chế tạo thành công xe tự hành, ứng dụng phương pháp điều hướng dùng IMU và đường dẫn ảo. Trong đó nổi bật là giải pháp thiết lập đường dẫn ảo từ IMU kết hợp với cảm biến đo góc quay (encoder) và các điểm tham chiếu nam châm. Nhờ phương pháp dẫn đường này, dù trong nhà kho không có các đường dẫn thông thường như vạch sơn hay vạch từ, xe AGV vẫn hoạt động tốt.
Một số điểm nổi bật trong thiết kế cơ khí
Nhóm nghiên cứu đã ứng dụng bộ lọc Kalman để tính toán, ước lượng góc hướng ( ) và vị trí ( ) của xe AGV dựa trên dữ liệu từ IMU. Điểm hạn chế của IMU là theo thời gian, các giá trị ước lượng sẽ bị sai lệch do sai số tích lũy từ chính cảm biến. Để khắc phục hạn chế này, trong phạm vi cụ thể của nhà xưởng, một số điểm tham chiếu nam châm được dán dưới sàn nhà nhằm hỗ trợ việc hiệu chỉnh sai số của vị trí và góc hướng của xe. Phương pháp này đã loại bỏ được sai số tích lũy cố hữu của IMU, nâng cao độ chính xác điều hướng của xe.
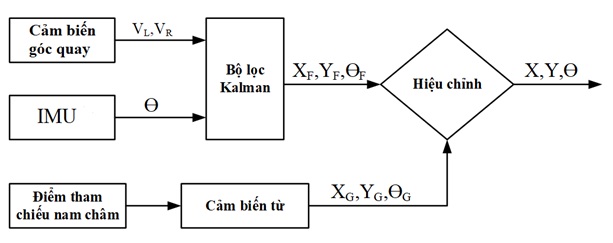
Sơ đồ cấu trúc của phương pháp điều hướng.
Để đáp ứng yêu cầu sử dụng xe AGV trong không gian hẹp, nhóm nghiên cứu đã thiết kế xe có cấu trúc 2 bánh dẫn động dạng vi sai và 4 bánh dẫn hướng. Với cấu trúc này, xe có khả năng vận hành linh động: di chuyển tiến/lùi, quay phải/trái và quay tròn tại chỗ.
Đối với mục tiêu chở hàng, yêu cầu an toàn khi di chuyển đòi hỏi việc lấy hàng phải chính xác, nhẹ nhàng, tốc độ nâng/hạ hàng không được quá lớn để tránh hàng bị xô lệch, va chạm mạnh. Vì vậy, cơ cấu lấy hàng đã được tính toán thiết kế theo dạng bàn nâng cắt kéo, nâng hạ bằng xy lanh điện để đảm bảo tốc độ nâng phù hợp.
Mẫu xe do Viện Tự động hóa Kỹ thuật quân sự thiết kế, chế tạo (hình 1) có khả năng chở tải tối đa 150 kg. Với thiết kế này, khi làm việc trong kho quân khí K90 (Bộ Tư lệnh Thủ đô) xe có thể chuyên chở được khối lượng khoảng 120 kg. Khi có nhu cầu mở rộng về tải trọng, nhóm nghiên cứu có thể thiết kế, chế tạo các xe AGV có khả năng chuyên chở lớn hơn.
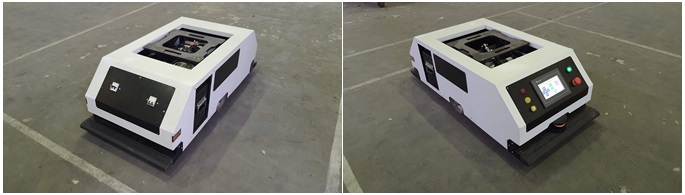
Hình 1. Mẫu xe AGV do Viện Tự động hóa Kỹ thuật quân sự thiết kế, chế tạo.
Để giúp người quản lý vận hành hệ thống có cái nhìn trực quan, có thể tối ưu hiệu quả hoạt động của hệ thống khi kết nối trực tiếp với các cấp quản lý cao hơn, một phần mềm quản lý và giám sát xe đã được xây dựng với những tính năng như sau: i) hiển thị sơ đồ khu vực hoạt động của xe AGV; ii) lập trình các tuyến đường cho các xe AGV hoạt động; iii) quản lý, giám sát hoạt động của các xe AGV; iv) lưu trữ dữ liệu và báo cáo.
Nhờ có phần mềm quản lý, giám sát, nhiệm vụ cho từng xe AGV được cài đặt vô tuyến thông qua máy tính từ xa kết nối với các xe. Trong kịch bản thử nghiệm (hình 2), xe AGV xuất phát tại vị trí trạm sạc di chuyển đến vị trí giá để hàng B1 lấy giá hàng (có hàng) đưa đến để tại vị trí xuất hàng A1, sau đó di chuyển đến vị trí giá để hàng A2 lấy giá hàng (không có hàng) đưa đến để tại vị trí giá để hàng B1. Kết thúc nhiệm vụ xe trở về vị trí trạm sạc nguồn.
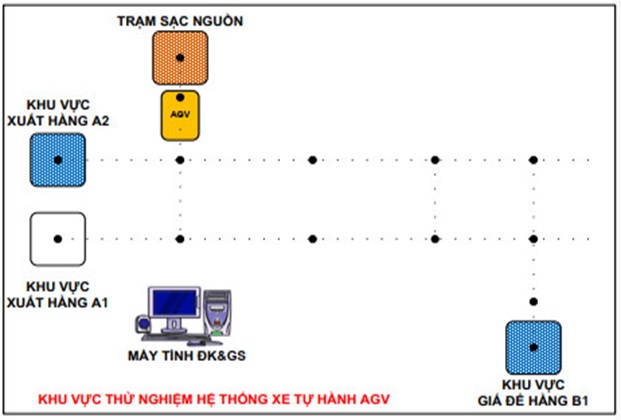
Hình 2. Mô tả khu vực thử nghiệm hoạt động của xe AGV.
Ứng dụng của xe AGV
Xe AGV ngày càng có vai trò quan trọng trong hoạt động công nghiệp do mang lại rất nhiều lợi ích như: tăng khả năng quản lý và giám sát thời gian thực cho hệ thống; đáp ứng được chức năng kết nối mạng để chia sẻ và lưu trữ dữ liệu; giảm nhân công làm việc ở những khu vực nguy hiểm, chật hẹp, nâng cao năng suất lao động và hỗ trợ các quy trình tự động hóa nhà máy.
Thị trường xe AGV được định giá khoảng 3 tỷ USD vào năm 2019 và dự kiến sẽ đạt tốc độ tăng trưởng khoảng 14,1% từ năm 2020-2027. Trong đó, thị trường khu vực châu Âu chiếm tỷ trọng cao nhất. Sự tăng trưởng của thị trường này chủ yếu do nhu cầu ngày càng tăng đối với các thiết bị xử lý nguyên liệu của các công ty sản xuất. Hơn nữa, tự động hóa trong mọi lĩnh vực cũng góp phần tăng cường sự tăng trưởng của thị trường khu vực này.
Điều đáng chú ý là ngành công nghiệp thương mại điện tử đã phát triển đáng kể ở các nền kinh tế mới nổi của khu vực châu Á - Thái Bình Dương như Trung Quốc, Ấn Độ. Sự cạnh tranh trong ngành này đang tăng lên và những công ty lớn trong ngành đang cố gắng tạo ra sự khác biệt bằng cách tối ưu thời gian giao sản phẩm cho người dùng cuối. Việc triển khai hệ thống AGV trong kho giúp các công ty thương mại điện tử tự động hóa các nhiệm vụ nội bộ, như phân loại, chọn và xếp hàng, từ đó tăng hiệu quả vận hành. Các quy trình xuất nhập kho và lưu trữ tự động, tin cậy đang thúc đẩy sự tăng trưởng của AGV đối với ngành này. Có thể liệt kê một số lĩnh vực mà AGV đang được ứng dụng hiện nay: công nghiệp chế tạo ô tô, không gian vũ trụ, thiết bị điện tử, hóa chất, dược phẩm, quân sự, thương mại điện tử, chuỗi bán lẻ...
*
* *
Hiện nay, trên thế giới, các xe AGV có đường dẫn và không dùng đường dẫn đã được sử dụng rộng rãi trong sản xuất, vận chuyển hàng hóa nội bộ trong các nhà máy, kho bãi. Tuy nhiên, ở trong nước thị trường xe AGV còn nhiều hạn chế, đặc biệt là các loại xe tự hành không cần đường dẫn do chi phí đầu tư ban đầu cao và công nghệ phức tạp. Trước mắt, sản phẩm của đề tài có thể được triển khai trong các nhà máy, kho hàng trong quân đội. Bên cạnh đó, sản phẩm cũng có thể được triển khai và áp dụng rộng rãi trong các khu công nghiệp, khu công nghệ cao trên cả nước.
TÀI LIỆU THAM KHẢO
1. Lê Bá Yến, Vũ Huy Mừng, Phạm Tiến Dũng (2010), “Thiết kế bộ lọc Kalman trên vi điều khiển DSPIC30F ứng dụng trong đo lường quán tính”, Tạp chí Nghiên cứu Khoa học và Công nghệ quân sự, 8, tr.147-152.
2. Lê Bá Yến, Chu Văn Hoạt, Lê Văn Tuấn, Vũ Xuân Vượng (2020), “Phương pháp điều hướng xe tự hành AGV dùng cảm biến quán tính và đường dẫn dảo, phục vụ vận chuyển hàng trong các môi trường đặc thù”, Tạp chí Nghiên cứu Khoa học và Công nghệ quân sự, Số Đặc san Hội thảo quốc gia FEE, tr.57-65.
3. Hakan Temeltas (2018), “A real-time localization method for AGVs in smart factories”, International Scientific Journal Science. Business. Society, 2, pp.45-50.
4. S.Y. Lee, H.W. Yang (2012), “Navigation of automated guided vehicles using magnet spot guidance method”, Robotics and Computer - Integrated Manufacturing, 28, pp.425-436.
5. M. Bando, Y. Kawamata, T. Aoki (2012), “Dynamic sensor bias correction for attitude estimation using unscented kalman filter in autonomous vehicle”, International Journal of Innovative Computing, Information and Control, 8(3), pp.2347-2358.